今日大学生网,社会实践报告投稿平台

南林学子研发磁流变液柔顺执行器 探索人机协作安全技术新路径
- 发布时间:2026-02-26 阅读:
- 来源:南京林业大学机械电子工程学院磁流变液柔顺执行器实践调研团队
2026年1月,南京林业大学机械电子工程学院磁流变液柔顺执行器实践调研团队,在指导教师王书友带领下,赴江苏省南京市开展为期十天的“返家乡”社会实践调研。团队深入江宁经济技术开发区、江北新区智能制造产业园、麒麟科技创新园,走访埃斯顿自动化、汇川技术、南京韵鼎机电工程有限公司等10余家机器人产业链企业,围绕人机协作安全议题,开展技术交流与产业需求调研。

图为团队在与企业技术人员交流。钱俐伶 供图
近年来,随着机器人在工业制造、商业服务、医疗康复等领域加速普及,人机共处同一空间的安全性问题日益凸显。2026年春节期间,某商场内一台展示中的机器人与清洁工发生意外碰撞,导致人员跌倒,引发公众广泛关注。国际机器人联合会2025年发布的《全球机器人安全报告》显示,2021年至2025年间,全球共报告人机协作事故327起,其中因机器人关节刚性冲击导致的伤害占比达63%。精密装配领域,刚性冲击带来的不良率约为2%至5%,成为制约企业提质增效的重要瓶颈。“传统位置控制的精度再高,也无法从根本上替代物理柔顺。”在南京韵鼎机电工程有限公司,技术主管向团队展示了精密装配场景的测试视频。当机械臂试图将微型轴承压入轴孔时,由于定位误差或工件尺寸公差,频繁出现卡滞或过盈损伤。该技术主管表示,如果磁流变执行器能实现毫秒级刚度调节,在碰撞瞬间切换至柔顺状态,将从材料层面解决刚性冲击问题。
磁流变液是一种可在液态与固态间实现毫秒级可逆转化的智能材料:无磁场作用时呈现液态自由流动特性,施加磁场后可在毫秒级时间内粘度骤增、转变为类固态,且这一过程完全可逆。团队将该材料应用于机器人肘关节、膝关节、腕关节等关键部位,实现关节刚度的主动调控——正常作业时保持刚性以承载负荷,意外碰撞瞬间切换至柔顺状态以缓冲吸收冲击。
经实验室测试,团队研发的磁流变执行器响应时间小于15毫秒,较传统串联弹性驱动器方案提升近一个数量级。在碰撞模拟实验中,搭载磁流变关节的机械臂与人体的接触力可控制在150牛顿以内,低于国际标准ISO/TS15066规定的200牛顿疼痛阈值。实验数据表明,从材料层面实现物理柔顺的技术路径具有显著可行性。
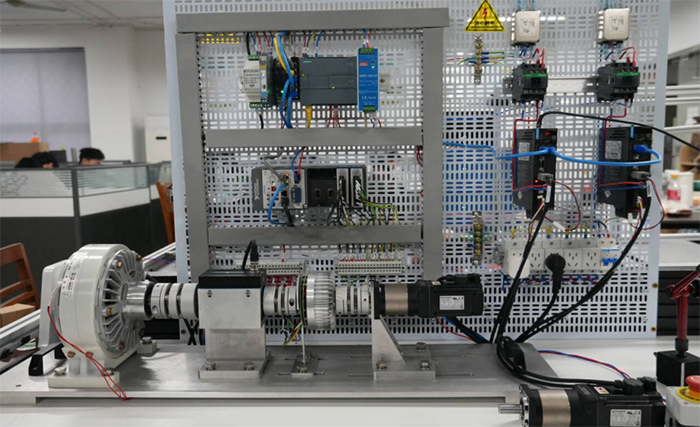
图为实验平台。李仕伟 供图
调研期间,团队系统梳理出当前机器人关节领域的三大核心痛点。其一,刚性冲击问题导致精密装配损伤率居高不下。其二,现有柔顺方案存在明显局限:串联弹性驱动器方案结构复杂、体积大、响应慢;力控方案对传感器精度要求高、算法复杂、成本居高不下。其三,高端执行器仍严重依赖进口,精密减速器国产化率虽有提升,但高精度伺服电机、力矩传感器等核心部件领域,进口品牌仍占据主导地位。基于调研成果,团队提出面向产业实际的三大应用方案。
协作机器人关节模块方面,针对制造业场景开发可直接替换现有刚性关节的磁流变模块,实现产线设备柔顺化改造,重点突破精密装配、打磨、抛光等需要力控的作业环节。
医疗康复外骨骼执行器方面,利用磁流变液的柔顺特性,使外骨骼能够适应人体自然运动,避免刚性机构带来的二次损伤,并通过刚度调节匹配不同康复阶段的需求。
服务机器人安全关节模块方面,面向商场、医院、社区等人机共融场景构建主动安全关节,在机器人意外接触人体时毫秒级切换至柔顺状态,从物理层面保障交互安全。
“在实验室我们关注磁场强度、响应时间、刚度变化等技术参数,在企业车间我们看到这些参数如何转化为良品率、能耗指标和工人安全。”团队成员李仕伟表示,此次调研让团队切身体会到科研必须回应真实世界需求。从技术参数到实际应用,从样品研发到产业化落地,材料稳定性、成本控制、可靠性验证等一系列课题需要持续攻关。
目前,团队已与企业签订意向订单,计划依托南京机器人产业生态推进中试验证与场景试点。
(通讯员 苏宇 李雨珂)
责编:周云
社会实践推荐
- 扫一扫 分享悦读 ➤
- 扫码可以分享到微信 qq朋友圈
社会实践热点